CSI 科研记录2.3 论文相关
本文共 3681 字,大约阅读时间需要 12 分钟。
按照spotfi==>Dynamic-MUSIC==>widar2.0三篇论文的基本顺序研究AOA,TOF,DFS;
SpotFi:Decimeter Level Localization Using WiFi(SIGCOMM 2015)——基于设备的,device-based。基于这篇论文开始理解基于到达角的测距、多重信号分类(MUSIC)算法就算AOA、利用CSI进行超分辨率AOA估计;
Dynamic-MUSIC:
有源定位,关联论文:IndoTrack和RT-Fall 针对CSI信号进行研究,需要不只一个接收器;widar2.0—Wifi下单链接实现人体跟踪:
工作原理: 1)将多位参数估计问题转化为最大似然估计问题,建立用户运动与CSI之间的关系,并采用期望最大值(EM)的求解器进行求解; 2)为了处理CSI信号的相位噪声,提出使用CSi测量的共轭倍增的新方法,是CSI的无偏移形式呈现,基本原理:一对均匀的天线在信道会经历相同的相位噪声,从而可以通过共轭乘法除去; 3)提出一种新的基于图的定位算法,可精确识别与目标多径参数的目标反射对应的参数,可通过AoA和ToF的几何衰减简单启动,并联合DFS提高定位精度; 系统概述: 1)CSI-Motion模块: 1、对收集到的含有噪声的CSIs数据进行数据清理 清理目标: a.由异步收发器引起的随机CSI相位噪声; b.静态路径(eg.LOS path)中的强信号; 2、通过移动目标放大反射信号 3、利用参数估计算法获得多径信号的多维参数 2)Motion- Tracking模块: 1、通过路径匹配模块识别移动目标反射信号对应的参数 2、在范围精致模块利用卡尔曼平滑融合ToF和DFS,用于计算距离 3、估计距离与AOA返回本地框架从而定位多维度参数:Angle-of-Arrival(AoA)到达角 ;Time-of-Flight(ToF)飞行时间 ;Doppler frequency shift(DFS)多普勒频率频移 ;attenuation衰减
论文设计将含有噪声的一系列参数转变为对应的定位信息;工作流程:找感兴趣的反射对应参数化=>范围精致=>输出定位;
被动跟踪难点:反射信号是比直接接受信号强度(RSSI)更弱的计量,并且在接受器出会出现其它物体的反射信号的叠加;
Widar2.0特点:
1、其它基于CSI的定位系统研究最少仍旧至少需要两个AP作为链接(或者用专门设计的设备); 2、从单个链路中寻求多个信号参数,而不是从多个链路中使用单个参数; 3、将Rx天线分开并且将每条天线视为单独链接;工作原理:
1、将多位参数估计问题转化为最大似然估计问题,建立用户运动与CSI之间的关系,并采用期望最大值(EM)的求解器进行求解; 2、为了处理CSI信号的相位噪声,提出使用CSi测量的共轭倍增的新方法,是CSI的无偏移形式呈现,基本原理:一对均匀的天线在信道会经历相同的相位噪声,从而可以通过共轭乘法除去; 3、提出一种新的基于图的定位算法,可精确识别与目标多径参数的目标反射对应的参数,可通过AoA和ToF的几何衰减简单启动,并联合DFS提高定位精度;
为了获得所需参数,通过三个关键组成部分实现这一关键组件:
1、一种新颖的统一CSI模型(3.1)及其最大似然制定,与一个有效的求解算法(3.2)一起进行多维参数估计; 2、一种CSI清理技术,其消除由定时偏移和载波频率偏移引起的随机相位噪声(3.3)。 3.1 CSI模型 由于多径效应,无线通道在时刻 t ,频率 f 和传感器(天线)s 具有以下测量: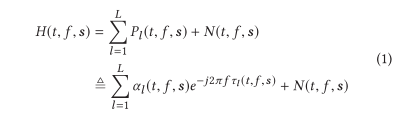 其中L是多径分量的总数,Pl 是第 l 条路径的信号。 al 和 τl 分别是第 l 条路径对应的复杂的衰减因子和传播延迟。N 是捕获背景噪声的复杂白色高斯噪声。 WiFi网卡在时间(数据包),频率(子载波)和空间(传感器)离散测量信道;H(i,j,k)表示在第 i个数据包中的第 k个传感器上的第 j个子载波中得到的离散测量,并且设H(0,0,0)为参考值;在H(i,j,k)下的第 l条路径的信号相位(除以2π)可被转化为:
其中L是多径分量的总数,Pl 是第 l 条路径的信号。 al 和 τl 分别是第 l 条路径对应的复杂的衰减因子和传播延迟。N 是捕获背景噪声的复杂白色高斯噪声。 WiFi网卡在时间(数据包),频率(子载波)和空间(传感器)离散测量信道;H(i,j,k)表示在第 i个数据包中的第 k个传感器上的第 j个子载波中得到的离散测量,并且设H(0,0,0)为参考值;在H(i,j,k)下的第 l条路径的信号相位(除以2π)可被转化为: 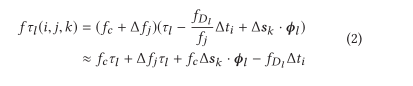 其中 fc 是信道的载波频率;Δti, Δfj, Δsk是在H(0,0,0)与H(i,j,k)中时间,频率和空间位置的差异;τl ,ϕl 和 fD 是在H(0,0,0)下第 l条路径的 飞行时间 ToF, (单位方向矢量)到达角 AoA 和 多普勒频率偏移DFS; 反映目标运动引起的TOF的变化; Δsk· ϕl 表示传感器之间的TOF差异;省略了二阶项,因为它们是小于线性和常数术语的量的级。 在短时间内,窄带宽和小光圈尺寸的情况下,信号衰减 al 假设所有测量都是恒定的;另外在公式(2)中的 fc τl 对于所有测量都是相同的,并且可以在参数估计的视图中合并到复杂的衰减 al 中, θl= (αl,τl,ϕl, fDl) 表示第 l条路径的信号参数,跟踪的第一步是估计目标反射信号的多维参数 θ。 3.2多维参数求解算法 转化为最大似然估计问题( maximum likelihood estimation (MLE)),使用的方法和music和FFT不一样: 为了简洁,将 m = (i,j,k),i = 0,1,··· ,T−1,j = 0,1,··· ,F−1, k = 0,1,··· ,S − 1, 表示为CSI测量H(I,j,k)的超域,其中T、F、S分别是数据包,子载波和传感器的数量。 给定测量观察H(m),我们的目的是获得多维多径信号参数 Θ 的MLE, Θ =
其中 fc 是信道的载波频率;Δti, Δfj, Δsk是在H(0,0,0)与H(i,j,k)中时间,频率和空间位置的差异;τl ,ϕl 和 fD 是在H(0,0,0)下第 l条路径的 飞行时间 ToF, (单位方向矢量)到达角 AoA 和 多普勒频率偏移DFS; 反映目标运动引起的TOF的变化; Δsk· ϕl 表示传感器之间的TOF差异;省略了二阶项,因为它们是小于线性和常数术语的量的级。 在短时间内,窄带宽和小光圈尺寸的情况下,信号衰减 al 假设所有测量都是恒定的;另外在公式(2)中的 fc τl 对于所有测量都是相同的,并且可以在参数估计的视图中合并到复杂的衰减 al 中, θl= (αl,τl,ϕl, fDl) 表示第 l条路径的信号参数,跟踪的第一步是估计目标反射信号的多维参数 θ。 3.2多维参数求解算法 转化为最大似然估计问题( maximum likelihood estimation (MLE)),使用的方法和music和FFT不一样: 为了简洁,将 m = (i,j,k),i = 0,1,··· ,T−1,j = 0,1,··· ,F−1, k = 0,1,··· ,S − 1, 表示为CSI测量H(I,j,k)的超域,其中T、F、S分别是数据包,子载波和传感器的数量。 给定测量观察H(m),我们的目的是获得多维多径信号参数 Θ 的MLE, Θ = 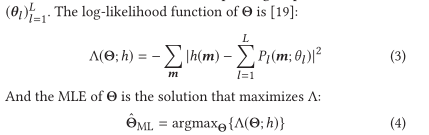 为了有效地解决问题,我们应用了减少整体搜索空间的空间交替的广义期望最大化(Sage)算法[8]。 SAGE算法是期望最大化(EM)算法[7]的扩展,其中算法的每次迭代仅重新估计θ的组件的子集,同时保持其他固定组件的估计。因此,我们可以将θ的估计分为多个参数的多个估计。 依次优化每个路径的参数。具体地,对于第L路径,期望步骤是分解CSI并计算第L路径的信号 Pl:
为了有效地解决问题,我们应用了减少整体搜索空间的空间交替的广义期望最大化(Sage)算法[8]。 SAGE算法是期望最大化(EM)算法[7]的扩展,其中算法的每次迭代仅重新估计θ的组件的子集,同时保持其他固定组件的估计。因此,我们可以将θ的估计分为多个参数的多个估计。 依次优化每个路径的参数。具体地,对于第L路径,期望步骤是分解CSI并计算第L路径的信号 Pl:  其中θ’是最后迭代中估计的参数。 βl是控制算法收敛速率的非负系数,默认设置为1。
其中θ’是最后迭代中估计的参数。 βl是控制算法收敛速率的非负系数,默认设置为1。  算法1总结了参数估计算法。除了E-Step和M-Step之外,θ初始化为0,并且当θ的估计收敛时,迭代结束,即,连续估计之间的差异在预定义的阈值ε内。 3.3CSI清理 为了过滤出无关噪声并仅保留感兴趣的频道响应,论文仔细分析了嘈杂的CSI结构并提出了CSI清洁算法。该算法的基础是由CSI相位噪声被TO引起并且CFO仅在时间和频率上变化,而在空间上不变。也就是说,同一NIC的所有传感器同时体验相同的未知相噪声。因此,WIDAR2.0选择传感器作为参考传感器(例如第K0个传感器),并计算每个传感器和参考传感器的CSIs之间的共轭乘法C(m):
算法1总结了参数估计算法。除了E-Step和M-Step之外,θ初始化为0,并且当θ的估计收敛时,迭代结束,即,连续估计之间的差异在预定义的阈值ε内。 3.3CSI清理 为了过滤出无关噪声并仅保留感兴趣的频道响应,论文仔细分析了嘈杂的CSI结构并提出了CSI清洁算法。该算法的基础是由CSI相位噪声被TO引起并且CFO仅在时间和频率上变化,而在空间上不变。也就是说,同一NIC的所有传感器同时体验相同的未知相噪声。因此,WIDAR2.0选择传感器作为参考传感器(例如第K0个传感器),并计算每个传感器和参考传感器的CSIs之间的共轭乘法C(m):  通过将多径信号分类为静态(FD = 0)组PS和动态(FD!=0)组PD,共轭乘法可以划分为:
通过将多径信号分类为静态(FD = 0)组PS和动态(FD!=0)组PD,共轭乘法可以划分为: 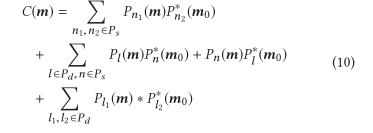 一方面,由于随着时间的推移静态信号是恒定的,因此可以通过高通滤波器去除等式10中的第一求和项。另一方面,由于静态信号比移动对象反射的信号强大,所以第三求和项比前两个术语较弱,并且可以省略。
一方面,由于随着时间的推移静态信号是恒定的,因此可以通过高通滤波器去除等式10中的第一求和项。另一方面,由于静态信号比移动对象反射的信号强大,所以第三求和项比前两个术语较弱,并且可以省略。  (11)式子中的第一个除了TOF是(τ-τn)以外,具有与公式2相同的相位结构。假设Pl是目标反射路径和Pn是LOS路径,因为收发器是固定的,并且它们的位置可用,因此从链路距离可以直接计算TOF τn,并且可以进一步推导出TOF τL。 然而,共轭倍增产生副产品公式Pn(m)P∗l(m0),它具有假的TOF,AOA和DFS各自对应(τn−τl),ϕn和−fDl ,为了消除副产品,通过从所有传感器的CSI幅度中减去来自CSI幅度的恒定值β并将恒定值γ添加到参考传感器的CSI幅度,当m!=m0,有:
(11)式子中的第一个除了TOF是(τ-τn)以外,具有与公式2相同的相位结构。假设Pl是目标反射路径和Pn是LOS路径,因为收发器是固定的,并且它们的位置可用,因此从链路距离可以直接计算TOF τn,并且可以进一步推导出TOF τL。 然而,共轭倍增产生副产品公式Pn(m)P∗l(m0),它具有假的TOF,AOA和DFS各自对应(τn−τl),ϕn和−fDl ,为了消除副产品,通过从所有传感器的CSI幅度中减去来自CSI幅度的恒定值β并将恒定值γ添加到参考传感器的CSI幅度,当m!=m0,有:  因此,可以省略副产物。下图显示了由我们的共轭乘法的方法校准的CSIS的谱图,其中DFS从嘈杂的CSI准确地恢复。另外,即使副产品术语C(M0)不能减轻,我们仍然保持C(M0),以便足够数量的天线用于AOA估计.C(M0)可以被视为两个对称多径术语的求和并且还适用于参数估计算法。
因此,可以省略副产物。下图显示了由我们的共轭乘法的方法校准的CSIS的谱图,其中DFS从嘈杂的CSI准确地恢复。另外,即使副产品术语C(M0)不能减轻,我们仍然保持C(M0),以便足够数量的天线用于AOA估计.C(M0)可以被视为两个对称多径术语的求和并且还适用于参数估计算法。 
对C(M)应用参数估计算法(算法1)以估计信号参数。具体而言,WIDAR2.0将CSI集合划分为0.1秒,其中信号参数被假定为静态。然后,它将参数估计算法应用于每个段并获得信号参数的估计实例。
转载地址:http://cdgwi.baihongyu.com/
你可能感兴趣的文章
scala学习之安装问题
查看>>
linux之shell倒引号,单引号,双引号,dirname,basename使用
查看>>
linux之shell文件路径切分,${str:a:b}用法
查看>>
Linux下如何查看版本信息
查看>>
LDAP常见错误码
查看>>
linux yum安装rpm包出现问题
查看>>
idea编译报错类似xxx.java:[85,65] 错误: 找不到符号
查看>>
ArrayList复制
查看>>
idea打开项目时,文件左下角显示橙色J
查看>>
SQL注入
查看>>
linux中ldconfig的使用介绍
查看>>
项目中常说的提供一个接口供某某调用,与java代码中接口的区别
查看>>
idea快捷键使用
查看>>
File 类的 getPath()、getAbsolutePath()、getCanonicalPath() 的区别
查看>>
Linux中zip压缩和unzip解压缩命令详解
查看>>
ldap适合入门学习
查看>>
ldap学习参考博客
查看>>
linux学习之source命令与alias(别名)使用
查看>>
MYSQL常用查询
查看>>
安装Linux虚拟机绑定IP操作
查看>>